Schnüffel-Roboter als Katastrophenhelfer
Feuchtigkeit, Katastrophenhelfer, mobile Schwarmroboter, Roboter, Sensoren, Sniffbots, Temperaturschwankungen
Wissenschaftler an der Technischen Universität Dresden arbeiten seit Juni 2019 an künstlichen Helfern, die in einem Katastrophengebiet Gefahren erkennen, beseitigen und somit Menschenleben retten können. Dafür haben sie in den letzten Monaten mobile Schwarmroboter – Sniffbots – entwickelt und mit intelligenten Algorithmen ausgestattet. Im gefährdeten Umfeld abgeworfen, können sie sich selbst organisieren und drahtlos untereinander kommunizieren.
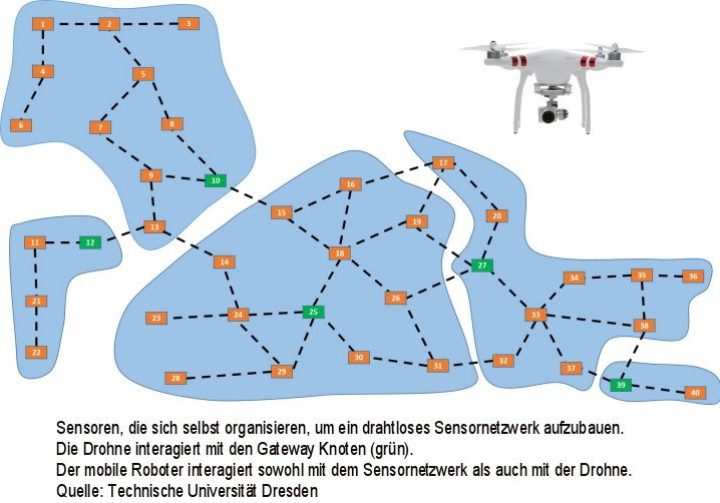
Denn Sniffbots arbeiten im Schwarm und im Verbund mit Drohnen und drahtlosen Sensornetzwerken am Boden. Ausgestattet sind sie mit einer Vielzahl unterschiedlicher Sensoren: sie können riechen, sehen, tasten, fühlen und hören und erkennen so Feuchtigkeit, Temperaturschwankungen sowie chemische Substanzen. Die Daten sammeln und verarbeiten sie lokal und senden sie in ihrem selbst aufgebauten 5G-Netzwerk in Echtzeit an die über dem Gebiet kreisenden Drohnen.
„Damit haben wir eine entscheidende Etappe genommen“, freut sich Teilprojektleiter Dr. Waltenegus Dargie von der Professur für Rechnernetze. „Sniffbots sind hochintelligent. Sie schätzen anhand der gesammelten Daten die Situation ein und entscheiden selbst, zu welchem Zeitpunkt Daten kritisch sind und übermittelt werden müssen oder wann sie beispielsweise Energie sparen können.“
Die Einsatzkräfte können so Gefahrengebiete sicher von fern überwachen und sofortige Hilfsmaßnahmen einleiten. Hat Sniffbot giftiges Gas erschnüffelt, kann so die Quelle gefunden und bestenfalls mittels mobiler Roboter versiegelt werden. Aber auch andere Einsätze, wie das Entschärfen von Bomben oder Beseitigen von Schutt in Katastrophengebieten, sind geplant.
Projektleiter Prof. Uwe Aßmann sieht in dieser Fernarbeit eine der ersten großen Anwendungen einer neuen Robotik: „Ich schätze, dass in fünf bis zehn Jahren eine Industrie für Fernarbeit existiert, für Fernwartung, Fernsensorik, Fernabnahme und Fernmanipulation. Sächsische Firmen sollten in diesen sich entwickelnden Markt investieren, und gerade die Corona-Krise stellt einen enormen Schub in diese Richtung dar.“ Der nächste Schritt des SNIFFBOT-Projektes besteht darin, (1) die Interaktion zwischen Drohnen, Roboter und Sensoren zuverlässig und effizient zu machen.
Quelle: Technische Universität Dresden


